cak63185
数控车床系统结构。cak63185
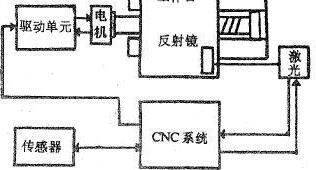
数控车床统的原理图如图所示,它主要由3部分组成:
cak63185数控车床伺服进给机构、cak63185数控车床控制及cak63185数控车床数据采集系统、cak
63185数控车床传感器系。cak63185数控车床伺服进给系统主要由cak63185数控车床AC伺服电机、cak63185数控车床滚珠丝杠和cak63185数控车床气浮溜板组成。cak
63185数控车床市场价与数控车床激光干涉仪有关。cak63185数控车床激光干涉仪是由日本精密株式会社研制的光纤结合小型激光干涉测长仪,它是一个封闭的系统,自身没有提供与cak63185数控车床数控系统的接口功能,为了能用它来构成cak63185数控车床伺服进给系统位置闭环,我们对它进行了适当的改造并设计了一套与cak63185数控车床主控制的接口电路,该接口电路除了具有对cak63185数控车床激光器的数据采集作用以外,还可以通过cak63185数控车床定时/计数器提供可编程的用于实时数据采集的中断触发信号.在进行cak63185数控车床数控系统的设计时,为了减轻主控制计算机的负担,提高cak63185数控车床市场价和cak63185数控车床数控系统的插补运算精度,数控装置由一个8098单片机系统来完成,它以插件板的形式插在主计算机的扩展槽内,与主机之间有一套自定义的接口协议,UPCAT的环境参数测量cak63185数控车床系统由我们自行开发,测量装置与控制装置采用GPIB总线联接会提高cak63185数控车床市场价。
cak63185数控车床市场价与数控车床系统测量精度有关。cak63185数控车床厂家根据cak63185数控车床激光干涉仪的测量原理,cak63185数控车床的安装结构以及测量头和反射镜在工作台的安放位置,本实验的测量cak63185数控车床误差主要有:激光干涉仪自身的性能误差、激光干涉仪的波长修正cak63185数控车床误差、系统的热膨胀误差、阿贝误差和工作台的移动方向与激光束的不同轴引起的误差等.激光干涉仪自身的性能误差δ1。
销售总部服务热线:13066608866