沈阳一机CAK80485数控车床的副也是组成机构的主要要素。沈阳一机CAK80485
数控车床两构件组成运动副后,就限制了两构件间的相对运动,对构件独立运动所加的限制称为约束。沈阳一机CAK80485
数控车床两构件通过运动副联接后,6个自由度将因运动副引入的约束而减少,运动副每加一个约束,构件便失去一个自由度,自由度和约束之和应为6。
80485数控车床价格与沈阳一机
CAK80485数控车床运动副有关。沈阳一机CAK80485数控车床可见自由度减少的数目就等于运动副所引入的约束的数目。沈阳一机CAK80485数控车床因两构件构成运动副后,仍需保证能产生一定的相对运动,故运动副引入的约束的数目最多为5个,而剩下的自由度最少为1个。80485数控车床价格与沈阳一机CAK80485数控车床构件有关。沈阳一机CAK80485数控车床的一个构件与另一构件组成运动副后,两构件间约束的多少和约束的特点完全取决于运动副的型式。沈阳一机CAK80485数控车床低副。沈阳一机CAK80485数控车床的两构件通过面接触而构成的运动副称为低副。根据它们之间的相对运动形式,运动副又可分为转动副和移动副。转动副。
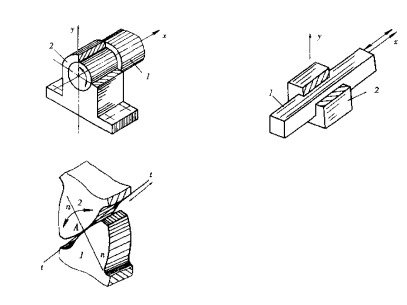
CAK80485数控车床价格与沈阳一机CAK80485数控车床铰链有关。沈阳一机CAK80485数控车床两构件只能组成在一个平面内作相对转动的运动副称为转动副,又称回转副或铰链。通常转动副的具体形式是用铰链连接,如图所示,构件1沿y轴和z轴两个方向的相对移动受到约束,构件1只能绕垂直于y-z平面的x轴转动。80385数控车床价格与沈阳一机CAK80485数控车床度数有关。沈阳一机CAK80485数控车床具有一个独立相对转动,其相对自由度数为1,而约束条件数为2。
沈阳一机CAK80485数控车床移动副。沈阳一机CAK80485数控车床的两构件只能组成沿某一方向线作相对移动的运动副称为移动副。如图所示,构件1沿y轴的相对移动和绕垂直于y-z平面的x轴转动受到约束,构件1只能沿x轴方向作相对移动。它具有沿一个方向的独立相对移动,其相对自由度数为1,而约束条件数为2。
销售总部服务热线:13066608866